2.2.3. 岸桥主要机构程序对应的功能FC(Function)
以上分析了岸桥起升机构的程序编写,与起升机构的程序类似, 岸桥的大车, 小车, 俯仰机构程序也要处理运行允许, 命令与速度给定,数据传输等。为了使整个项目程序结构清晰,我们将各个功能细分,如下图3-14所示是:主要机构运行控制的功能FC,以及用于命令与速度给定传输的PROFIBUS总线数据传输功能块FB:

图2-7:岸桥主要机构对应功能FC
这些功能FC的作用如下:
l FB22 起升/大车1#变频器PROFIBUS总线数据传输
l FB23 起升/大车2#变频器PROFIBUS总线数据传输
l FB24 小车/俯仰变频器PROFIBUS总线数据传输
l FC31 起升运行控制
l FC41 大车运行控制
l FC51 小车运行控制
l FC61 俯仰运行控制
2.2.4. 岸桥辅助机构的运行程序
在岸桥上还有一些辅助机构需由PLC程序来控制。这些功能FC如下图2-8所示:
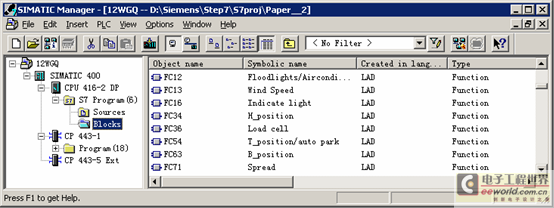
图2-8:辅助机构控制
这些功能FC的作用如下:
l FC12 投光灯,空调的启动,停止控制。
l FC13 风速处理:当风速达到警报值时发出信号。
l FC16 指示灯显示:控制各个操作站的指示灯。
l FC34 起升编码器位置处理:判断起升上下的停止,减速位置等。
l FC36 负载重量处理:判断负载是否超过额定。
l FC54 小车编码器位置处理:判断小车前后的停止,减速位置等。
l FC63 俯仰编码器位置处理:判断俯仰上下的停止,减速位置等。
l FC71 吊具控制:吊具在起吊集装箱时的控制,如吊具锁头的开闭功能。
结合岸桥主要机构,辅助机构控制的功能FC,以及PROFIBUS总线通讯数据传输的功能块FB等,完成了岸桥PLC程序的设计。
3. PLC程序的统一性问题
3.1. PLC程序统一性问题的发现
在岸桥的PLC程序编写完成后,我们随即在岸桥上进行了调试,由此发现了程序的统一性问题,该问题是这样的:我们所进行的这个项目有12台岸桥,在岸桥上,有些数据的定义需根据现场的实际情况来定义,举一简单的例子:
比如小车机构位置编码器的零位数据OFFSET,对于调试的第一台岸桥,我们可以很容易加以这样定义:将小车机构行驶到最后面的终点位置,读出小车在该位置时位置编码器的读数,以此作为小车机构位置编码器的零位数据OFFSET。但我们在调试第二台岸桥时发现,由于机械安装的误差,第二台小车机构行驶到最后面的终点位置时,读出的小车位置编码器读数与第一台岸桥的数值不相同。也就是说,我们必须将第二台岸桥的小车机构位置编码器的零位数据OFFSET设置成不一样的数据。
与此有相同问题的数据还有诸如重量传感器的比例系数,小车自动停车时停车位置点,俯仰机构的上升终点位置等等。这些问题都产生了一个后果,调试结束后每台岸桥都有对应的PLC程序,彼此之间不统一。
3.2. 解决PLC程序统一性问题的分析
分析这个问题,我们设想了以下解决问题的方法:
n 我们可以增加设计这样一段解决问题的“岸桥编号识别”程序:首先让各台岸桥编号:比如岸桥1,岸桥2。。。。。。岸桥12,PLC程序运行“岸桥编号识别”程序来判定该岸桥的编号,如果是岸桥1,“岸桥编号识别”程序就执行将岸桥1的数据装载到一“共用数据块”。
“岸桥编号识别”执行完毕后,我们所需要的数据都在这“共用数据块”中,之后PLC在程序运行时,如需要用到那些各台岸桥有差异的数据,就可以从该“共用数据块”中读取所需要的数据。整个过程如图3-1所示:

图3-1:“岸桥编号识别”程序
2026-05-26 15:11
2026-05-26 15:11
2026-05-26 15:09
2026-05-26 15:09
2026-05-26 15:08
2026-05-26 15:07
2026-05-26 15:07
2023-11-21 09:32
2023-11-01 14:51
2023-09-14 09:30














 粤公网安备 44010602004383号
粤公网安备 44010602004383号