2.1.2. 岸桥起升机构的运行控制
起升机构运行过程控制如下:
l PLC采集司机发出的运行指令及速度给定指令。
l 通过PLC程序进行逻辑判断,判断是否满足“运行允许”的情况。
l 如果PLC程序逻辑判断满足“运行允许”的情况,接下来要进行的就是起升速度的处理,其处理如下:
n 如果不存在减速运行命令,则传动机构按司机给定的速度运行。
n 如果PLC收到减速运行信号,PLC则将速度处理为司机给定速度的10%。
l 最终,PLC需将这些运行命令,运行速度通过PROFIBUS总线传输给变频器,变频器带动电机运行,实现起升机构的运行。
2.2. 程序编写
2.2.1. Symbol表的编写
在编写PLC程序之前,对于I/O 变量, 由于其在原理图上已定义, 我们可以先将其在SYMBOLS中输入。
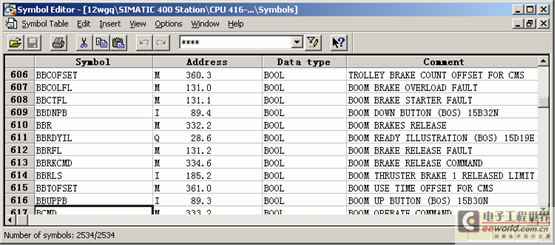
图2-1:SYMBOLS表
2.2.2. 岸桥起升运行程序
下面我们以起升机构为例, 编写一段岸桥起升运行程序。
步骤一:编写“起升允许”程序。我们编写的“起升允许”程序如下图2-2所示:
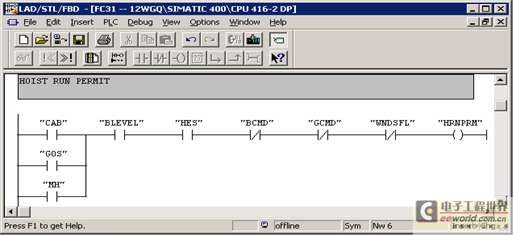
图2-2:编写 “起升允许”程序
步骤二:编写“起升命令控制”程序。当起升机构满足了“起升允许“,PLC就可以发出起升向上/下的命令。如图2-3所示:
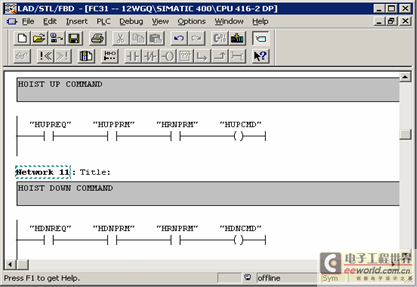
图2-3:起升运行命令
步骤三:编写“起升速度的控制”程序。在这段程序中:当司机在驾驶室把控制电源合上,并发出起升命令,如果有减速命令存在,则将给定值变为原来的10%,程序如下图2-4所示。

图2-4:速度给定信号处理
步骤四:编写“起升命令与速度控制”程序。以上的程序完成了岸桥起升运行的命令和速度给定的产生,最终我们就是要将这命令与速度给定通过PROFIBUS总线传输给变频器,如图2-6是调用了西门子公司功能块库中的一个PROFIBUS数据传送功能块PCD_SEND,用来传送数据块DB123中的16个字。。

图2-5升命令与速度控制
图2-6总线数据传输
2026-05-26 15:11
2026-05-26 15:11
2026-05-26 15:09
2026-05-26 15:09
2026-05-26 15:08
2026-05-26 15:07
2026-05-26 15:07
2023-11-21 09:32
2023-11-01 14:51
2023-09-14 09:30














 粤公网安备 44010602004383号
粤公网安备 44010602004383号