一、公 司 介 绍
我公司是一家专业研发、生产和系统集成港口自动控制系统、智能机器视觉产品、无线数据采集产品的高新技术企业。公司拥有多项国际领先的发明和实用新型专利、软件著作权,多路员工以多名国外工作的留学生为基础,拥有一批朝气蓬勃、奋发向上、团结一致的员工,公司利用自身优势,不断跟踪、引进、消化、吸收国外先进的科学技术产品和经营管理方法,形成了一支不断学习、不断进步的团队。
公司主要产品和业务涉及港口自动控制系统的工程应用、机器视觉产品的设计和开发、计算机数据采集与监控的相关产品和系统集成等。应用领域包含众多工业领域,如:港口、船厂、重型机械、电力、水利、交通、石油、冶金、以及市政供水、供热、燃气和污水处理等。
公司一贯坚持“以人为本,以技术为实力,以全球为战略高度,以发展和提高民族工业为己任”,因此,我们不仅要为客户提供优质的产品和系统的解决方案,还可为客户提供卓越的专家咨询、教育培训、技术支持以及售后服务。通过与上海港务局、香港港口、华能集团、港机企业、美国MAXSTREAM公司、英国PACSCOM公司、澳大利亚ELPRO公司等的工程合作和业务合作,公司不断发展壮大。
企业文化:
文化理念:团结、务实、创新、卓越
价值理念:发展企业、造福社会、成就员工。
管理理念:打造一个快乐和谐的高效团队
二、港口轮胎吊“自动纠偏”大车行走系统方案
基于国外多年的工作经验和研究,多路核心技术人员在智能机器视觉有其独到的产品和技术,特别是在室外环境下智能机器视觉更是独树一帜,目前,公司已拥有多项专利和自有技术,在港口集装箱吊车的防摇、定位,防碰撞、防抖动、以及集装箱卡车的定位有成功应用实例和经验,在业界赢得了一定的声誉,并在国内外一流港口(上海和香港)实施相关的技术和工程。并针对越来越多的港口轮胎吊“自动纠偏”大车行走的需要进行了研发,有多项自主创新技术并申请了专利,该项目同时与上海港外高桥二期进行了合作和实验,现已完成了8个月的现场使用,效果非常理想,引起了众多码头和港机厂的青睐,产品积具推广应用价值。
1.项目背景概述:
轮胎吊高25
路径线与其内部的最外侧集装箱距离约30
为保证轮胎吊的直线行驶,时刻避免碰撞,存在以下问题:
l 从
l 对轮胎吊驾驶速度可能放慢,浪费效率,
l 轮胎吊一旦开偏,由于轮胎吊的转弯角度很小(转弯半径很大),角度为0.5度,因此,一旦开偏往往很难直接转弯,而是通过来回开大车来调整吊车姿态偏差,费时费力费能源,
l 大车行走安全区域变小,(如引入“电缆卷筒”“低架滑触线”的油改电技术)要求轮胎吊有实时防碰撞和自动纠偏功能。
l 由于疲劳和情绪影响,司机往往不可避免地有小概率失误,每年发生轮胎吊撞箱事故时有发生,但一定发生损失很大。
2005年某集装箱码头事故统计表
|
2005年 |
集装箱码头的吞吐量(万TEU) |
龙门吊相碰撞或大车走偏事故(起) |
碰撞或大车走偏事故损失(万元) |
|
合计 |
188.4 |
38.8 |
121.3 |
2. 系统工作原理
港口轮胎吊工作的过程中,轮胎吊的驾驶要求其沿着行径路线准确驾驶,防止意外碰撞造成重大损失;且行驶速度快,有助于集装箱的高效吊装。上海多路集多年的国内外经验,特别是在工程车上的利用图像系统完成自动驾驶的成功应用经验,提出港口轮胎吊“自动纠偏”大车行走系统方案。该系统采用视频连续图像的快速实时识别方式,通过安装在车辆头、尾的两个摄像机,来识别行径道路上的白色/黑色标示线,并把标志线的位置和方向结果通过网络传输给控制器PLC,确定吊车偏离轨迹的数据,并运用行走模型和模糊控制技术,及时反馈给轮胎吊PLC来控制大车行走。
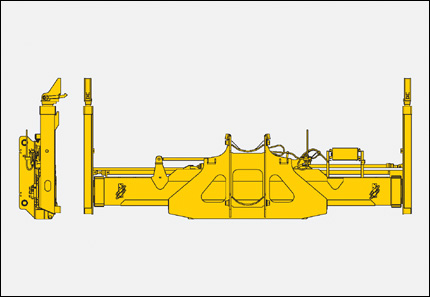
C C 摄像机位置示意图
摄像机的安装处在吊车头部和尾部固定高度的带减震的刚性支架上,该固定支架需保证其位置在吊车的运动和升降中不会与吊车的几何中心发生位移,从而保证在使用过程中摄像机内的轨迹和吊车主体的位置相对固定。摄像机安装的角度、方向和高度,可在一定范围内变化,系统有自适应功能。为确保在行进过程中白色/黑色标识线在摄像机的视野范围,要求摄像机镜头到地面的距离大于一定高度,这样可确保在一定范围内输出偏移量,在摄像机的视野范围尽量做到没有异物长时间遮挡摄像机的视线。
由于图像处理需要对大量的数据进行两维的信息处理,即使再快的DSP处理器对复杂的图像,特别是室外环境的图像处理起来有相当的延时,我们在图像处理的快速性,准确性和可靠性方面有许多专有技术和经验,可以保证满足用户的实时要求。
采用头尾两台摄像机是为了系统的安全性和可靠性,当头尾两台摄像机都捕捉到正确的目标时,系统闭环工作,从而可以保证系统工作安全可靠。
3. 系统框图
对两个摄像机中的图像进行处理之后,将得到的偏移量数据通过网络接口输出给PLC控制器,供车辆控制系统控制并校正前进方向,达到自动纠偏的目的;在手动时,机器视觉还能监控报警。
系统框图
4.系统性能指标:
l 纠偏系统通过网络传输线连续的在不多于200ms的时间内向控制系统发送一组(前后两个)白色/





















 粤公网安备 44010602004383号
粤公网安备 44010602004383号